


A la une

Les parcs éoliens offshores se multiplient pour répondre aux demandes européennes de production d’énergie renouvelable. Une équipe de scientifiques nantais travaille sur un réseau sous-marin acoustique de capteurs pour suivre en permanence l’état des éoliennes en mer.
Avec seize projets de parcs éoliens en mer sur les côtes métropolitaines, la France s’engage sur les traces de ses voisins britanniques (44 % des près de 6 000 éoliennes offshores installées en Europe), hollandais et allemands. La Commission Européenne, elle, ambitionne de multiplier par cinq en dix ans les capacités de production, en partie grâce à l’éolien flottant en eaux profondes. À l’horizon 2050, une production de 450 GW est ainsi envisagée sur les côtes européennes.
Pour assurer la durabilité des installations tout en limitant autant que possible l’intervention humaine (plongeurs pour les structures immergées, par exemple), il est nécessaire d’accompagner ces déploiements d’infrastructures offshores par des technologies de surveillance sous-marine. À la manière de l’Internet des objets terrestres, qui consiste en un grand nombre de capteurs communicants par des liens sans fils radios, l’Internet des objets sous-marins consiste en un réseau de capteurs sans fil, en fond de mer ou le long des structures immergées. Ceci permet d’assurer une surveillance permanente des installations offshores, qui peut être complétée de façon ponctuelle par des dispositifs robotiques mobiles de type ROV1 AUV2 ou USV3.
Un parc éolien offshore se compose généralement de 60 à 160 éoliennes (fixes) organisées autour d’une sous-station électrique vers laquelle converge l’ensemble des câbles électriques dynamiques. La production électrique est acheminée depuis la sous-station vers la terre par un câble d’export enfoui dans le sol marin. Les éoliennes flottantes, quant à elle, comportent des éléments critiques comme le câble dynamique, qui doit observer une courbure bien spécifique pour amortir le phénomène de houle, la liaison entre le câble dynamique et le câble statique, et enfin le système d’ancrage. Ce type de données fait partie de ce qu’on cherche à transmettre à la surface. En général, ces différents composants sont situés à des profondeurs supérieures à 40 mètres pour les côtes atlantiques, voire à plus de 200 mètres en mer Méditerranée. En raison des mouvements des structures (provoqués par les houles et le vent) et des profondeurs envisagées, l’internet des objets sous-marins privilégie les communications sans fil.
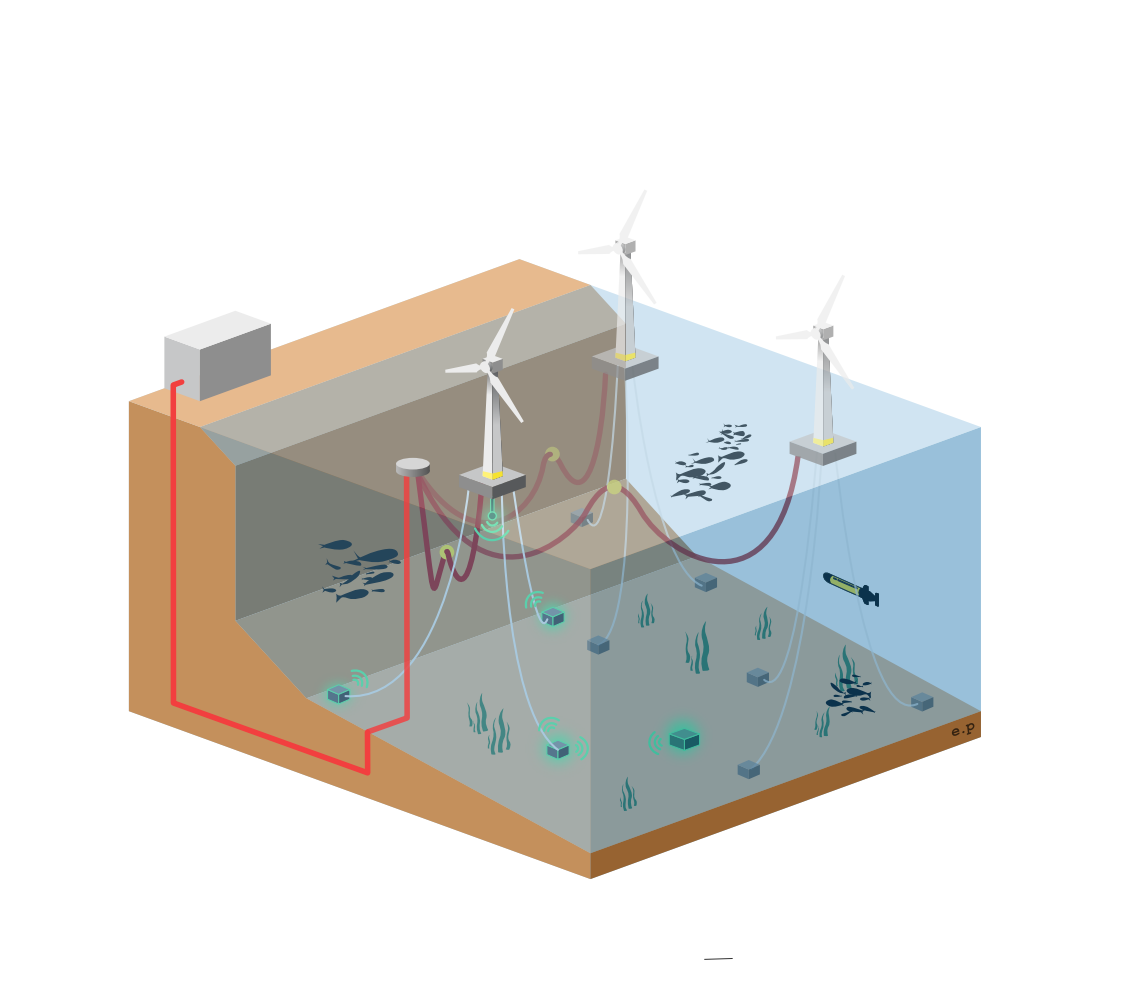
Internet des objets sous-marins pour la surveillance d’éoliennes flottantes offshores © Étienne Parrein cc-by-nc-na
Du son pour communiquer sous l’eau
Il est possible de s’appuyer sur différentes technologies sans fil : la radio, mais celle-ci est fortement atténuée dans les milieux aqueux ; l’optique, qui nécessite une eau peu turbide (sans particules) pour assurer une bonne transmission de données en ligne directe ; enfin, le son qui bénéficie de nombreux avantages, dont la portée kilométrique du signal.
Sous l’eau, les ondes acoustiques ont une vitesse de propagation de 1 500 mètres par seconde, soit cinq fois plus vite que dans l’air. Cette vitesse de propagation est néanmoins extrêmement lente si nous la comparons à la vitesse de la lumière (300 000 km/s) : elle est 200 mille fois plus lente qu’une onde radio dans l’air. À titre de comparaison, la communication acoustique à 200 mètres sous la surface peut demander autant de délai qu’une communication radio de la Terre à la Lune4. Mais sous l’eau, les ondes acoustiques bénéficient d’un avantage de taille : elles se transmettent sur plusieurs kilomètres. C’est donc en faisant un compromis entre portée et temps de transmission que les scientifiques conçoivent leur réseau sous-marin.
L’équipement qui permet de communiquer les données des capteurs de structure est un modem (pour modulateur/démodulateur) acoustique. C’est le même équipement qu’on retrouve chez les particuliers pour pouvoir accéder à l’Internet par fibre optique ou ADSL, au détail près que celui-ci émet du son (à la manière d’un haut-parleur), en général à une fréquence autour de 30 à 40 kHz (ce sont des ultra-sons, au-delà de l’audible pour l’humain) et à des débits pouvant être extrêmement faibles (50 bits par seconde). Ce même équipement peut également recevoir des données (à la manière d’un microphone) pour assurer une communication dans les deux sens.
Un réseau pour organiser la remontée de données à la surface
À raison de cinq à dix modems par éolienne, soit environ plusieurs centaines de modems immergés par parc éolien, une problématique de réseau apparaît. En effet, il est nécessaire de coordonner l’ensemble pour faire remonter la donnée des capteurs de structure de la manière la plus fiable et en évitant le plus possible les collisions, c’est-à-dire en évitant que les modems communiquent en même temps.
C’est à ce moment précis qu’intervient l’ingénierie des réseaux, qui permet de faire communiquer un très grand nombre d’équipements de manière coordonnée (comme sur l’internet). Pour faire simple, il s’agit de concevoir une sorte de réseau Wifi sous-marin fiable. La prérogative de coordination relève de la couche 2 du modèle OSI (Open System Interconnection) communément appelée couche MAC pour Medium Access Control. Depuis une quinzaine d’années, il existe dans la littérature un assez grand nombre de propositions de protocoles MAC pour des réseaux acoustiques sous-marins qui peuvent se résumer à deux catégories : d’une part, les protocoles asynchrones comme par exemple T-Lohi qui, à l’instar des protocoles Wifi, va utiliser des signaux de requête avant de communiquer une information et, d’autre part, les protocoles synchrones comme TDA-MAC (pour Transmit Delay Allocation)5 qui alloue un intervalle de temps précis à chaque modem afin de minimiser les collisions. C’est ce protocole que l’équipe du projet Blue IoT Eolia6 a identifié pour déployer son réseau de capteurs au sein de parcs éoliens offshores.
Expérimentations virtuelles, en eau douce et en mer
Avant de procéder à des déploiements expérimentaux en milieu naturel (rivière, lac puis domaine maritime), l’équipe de scientifiques travaille sur des simulateurs de réseaux pour modéliser la propagation acoustique sous-marine ainsi que le comportement des protocoles de communication, au paquet de données près. Cette première étude permet de paramétrer correctement le réseau, de manière à garantir les meilleures performances en matière de qualité de service (taux de paquet délivré notamment), tout en évaluant la consommation énergétique des modems pour estimer la durée de vie du réseau. En effet, le réseau doit fonctionner de manière autonome sur batterie pendant plusieurs mois sans intervention humaine.
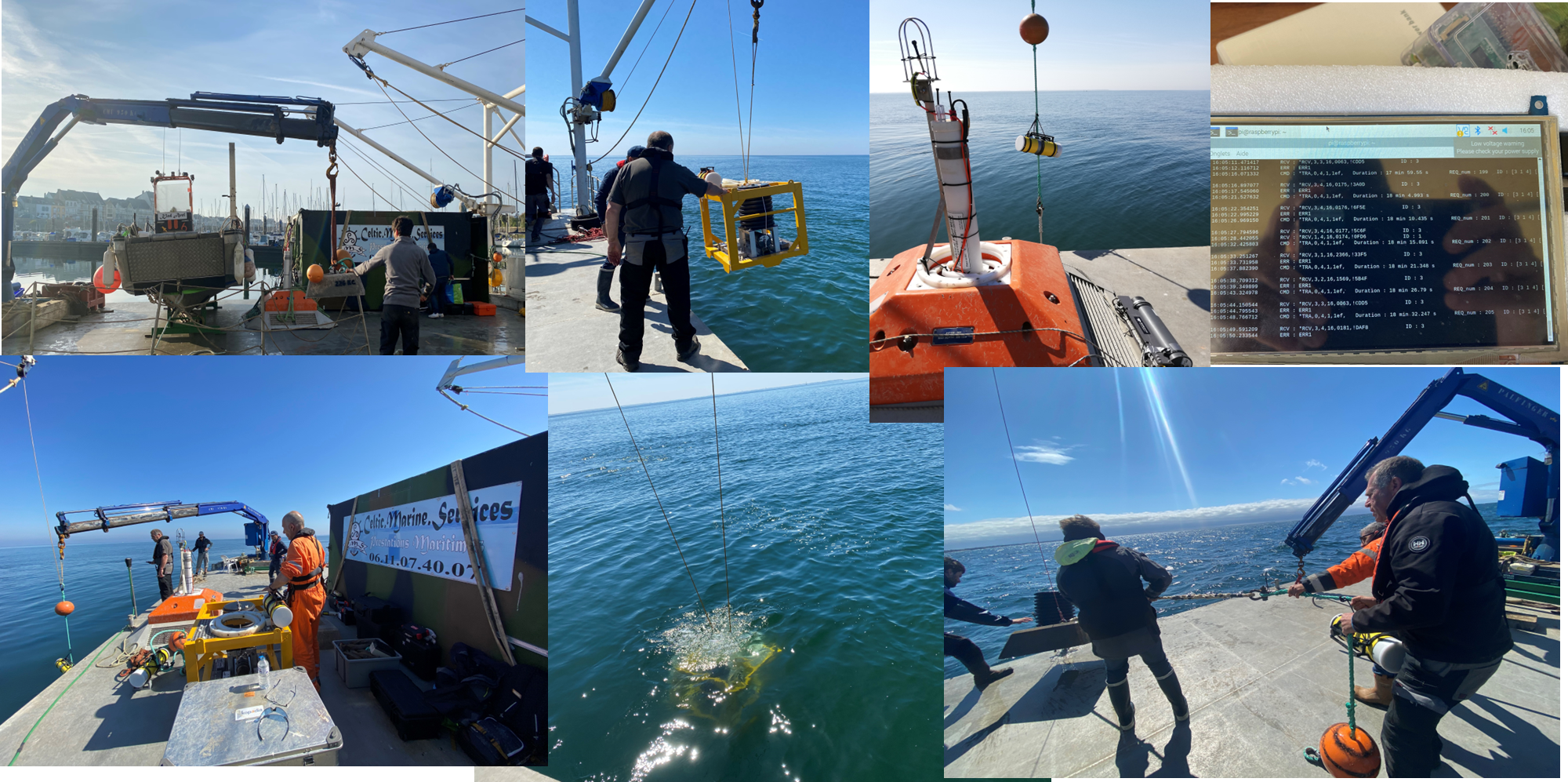
Expérimentations du protocole TDA-MAC près du port de la Turballe (Loire Atlantique) effectuées en mai 2022. © Projet Blue IoT Eolia
Après des tests en milieu naturel sur l’Erdre (près de Nantes), à Abbaretz, puis à la Turballe, les scientifiques ont pu valider l’intérêt du protocole TDA-MAC pour la surveillance sous-marine d’éoliennes offshores7. À l’aide d’enregistrements d’hydrophones, ils ont également montré que les niveaux sonores des communications entre les éoliennes étaient bien en deçà des seuils de dérangement établis en 20198 pour les cétacés et les pinnipèdes.
La maximisation de la durée de vie du réseau (notamment en régulant les puissances acoustiques et électriques mises en jeu), la conception du plan de données pour optimiser le transfert des informations formatées par les capteurs, ou encore l’interaction avec des unités mobiles de type AUV restent des pistes à étudier. Ce travail peut s’étendre à la surveillance des écosystèmes subaquatiques ou à la sécurité d’installations sous-marines fixes (de communication, de transport d’énergie, etc.).
Benoît Parrein, Laboratoire des sciences du numérique à Nantes (LS2N), Jean-Marc Rousset Laboratoire de recherche en hydrodynamique, énergétique et environnement (LHEEA).
- 1. ROV : Remote Operating Vehicle, robot opérée depuis la surface à l’aide d’un câble
- 2. AUV : Autonomous Underwater Vehicle : robot autonome prévu pour des missions sur de grandes distances
- 3. USV : Unmanned Surface Vehicle : véhicule de surface en pilotage autonome
- 4. Nils Morozs, Paul D. Mitchell and Yuriy V. Zakharov, "TDA-MAC: TDMA Without Clock Synchronization in Underwater Acoustic Networks," in IEEE Access, vol. 6, pp. 1091-1108, 2018, doi: 10.1109/ACCESS.2017.2777899.
- 5. Nils Morozs, Paul D. Mitchell and Yuriy V. Zakharov, "TDA-MAC: TDMA Without Clock Synchronization in Underwater Acoustic Networks," in IEEE Access, vol. 6, pp. 1091-1108, 2018, doi: 10.1109/ACCESS.2017.2777899.
- 6. Le projet Blue IoT Eolia est porté par la société Kopadia en partenariat avec le Laboratoire des Sciences du Numérique de Nantes (LS2N - CNRS/École Centrale de Nantes/Nantes Université). L’Infrastructure de Recherche SEM-REV est le prestataire de recherche. Ce projet, labellisé par le pôle Mer-Bretagne Atlantique, est financé par la région Pays de la Loire
- 7. Benoît Parrein, Fekher Khelifi, François Babin, Thierry Grousset, Jean-Marc Rousset, Loïc Helloco, Underwater acoustic sensor network to monitor floating offshore wind: SEM-REV sea trials, à paraître à OCEANS 2023, 5-11 June 2023, Limerick, Irlande.
- 8. Southall, Brandon L., et al. "Marine mammal noise exposure criteria: Updated scientific recommendations for residual hearing effects." Aquatic Mammals 45.2 (2019): 125-232.