


A la une
Autonomes ou pilotés, les robots ont besoin d’algorithmes qui planifient leurs mouvements afin de réaliser leurs tâches. Ces calculs sont basés sur des modèles physiques de la machine et de son environnement, avec des informations telles que le poids et les dimensions de l’appareil ou la largeur du couloir qu’il doit traverser. Il n’est évidemment pas possible de tout modéliser sans faire exploser les coûts et les temps de calcul, et il est parfois tout simplement impossible d’y parvenir car les phénomènes en question ne sont pas assez bien compris. La planification n’est donc jamais parfaite. C’est généralement la raison pour laquelle un robot va trébucher ou se cogner contre un mur, ce qui risque de causer des dégâts et l’empêcher de remplir sa tâche. Ces questions sont au cœur des travaux de Paolo Robuffo Giordano, directeur de recherche CNRS à l’Institut de recherche en informatique et systèmes aléatoires (IRISA)1. Il dirige depuis 2018 l’équipe de robotique Rainbow, unifiée autour du thème de l’interface entre robots et humains.
Une commande partagée entre humains et robots
« Les robots gagnent en autonomie, mais de nombreuses tâches réclament encore qu’ils soient accompagnés d’opérateurs humains, qui ont de leur côté besoin d’informations pour prendre des décisions, explique Paolo Robuffo Giordano. Un joystick peut permettre de contrôler une machine, mais il peut aussi être utilisé pour donner un retour de force pour prévenir l’opérateur que le mouvement qu’il demande au robot est, par exemple, impossible par manque d’espace pour manœuvrer. Notre équipe s’intéresse particulièrement aux bras manipulateurs, aux robots mobiles dont des fauteuils roulants semi-autonomes, aux drones et à comment une seule personne peut en contrôler plusieurs en même temps, idéalement avec un seul appareil de commande pour l’ensemble. »

Bras manipulateur ©IRISA
De nombreux scientifiques travaillent sur les modèles de contrôle et les systèmes de planification, mais les progrès vers davantage d’autonomie pour les robots sont entravés par le manque de solutions génériques capables de faire face aux incertitudes du monde réel. Cela signifie que les algorithmes ont besoin de multiples adaptations pour chaque cas de figure : ils sont donc moins efficaces dans leurs calculs et présentent un risque accru d’erreurs.
Les efforts de Paolo Robuffo Giordano sont répartis en trois grands axes. D’abord, chercher la meilleure façon de quantifier les effets des incertitudes sur la planification de trajectoire. Ensuite, exploiter ces informations pour générer des plans de mouvements plus robustes. Enfin, tester ces solutions sur des robots en conditions réelles et les comparer aux autres approches connues.
Comme une série de tubes autour du robot
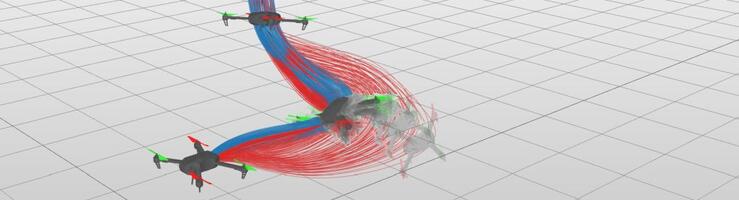
« Nous avons développé, il y a quelques années, un outil mathématique qui quantifie les effets des incertitudes que l’on a sur les différents paramètres du modèle d’un robot, ainsi que leur impact sur l’évolution des états du robot, précise Paolo Robuffo Giordano. On peut ainsi prédire l’enveloppe des mouvements possibles en fonction de la qualité des informations disponibles. Cela revient à avoir un tube autour de chaque partie du robot : on ne sait pas exactement quels seront ses gestes à l’intérieur de ce tube théorique, mais on sait qu’ils ne sortiront jamais de cette zone. Par exemple, si aucune enveloppe ne touche un obstacle, le robot ne pourra pas s’y cogner. La planification de trajectoires devient alors intrinsèquement robuste aux incertitudes. »
Ces algorithmes font actuellement l’objet de différents tests en situation réelle. Les chercheurs de l’IRISA, qui ont donc développé l’outil mathématique qui quantifie les incertitudes dans les mouvements d’un robot, sont pour cela épaulés par des collègues du Laboratoire d’analyse et d’architecture des systèmes2, qui interviennent principalement sur la planification des gestes des robots. L’université néerlandaise de Twente, dans la ville d’Enschede, apporte de son côté son expertise dans la conception et l’étude des drones.
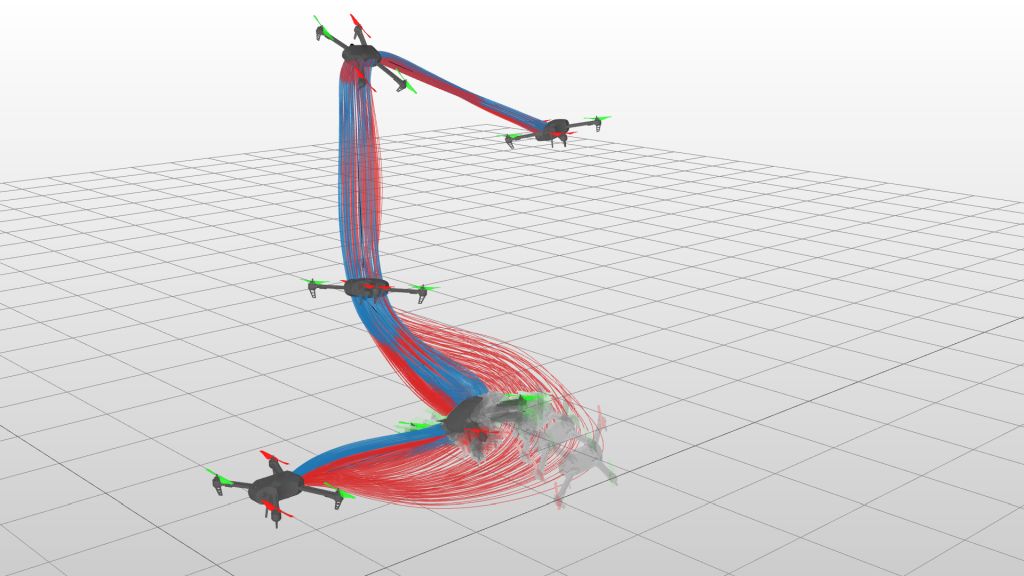
Enveloppe des mouvements possibles d'un drone en vol ©IRISA
Des modèles à l’épreuve du réel
Démarré en 2021, ce projet va durer jusqu’en 2025. Paolo Robuffo Giordano et ses collègues examinent en ce moment deux grands cas d’usage industriel. D’abord, un bras robot qui doit attraper et ranger le plus rapidement possible des objets de tailles diverses. Les variations de formats ralentissent fortement les cadences, mais le système robuste y parvient plus vite, car il ne recalcule pas les trajectoires pour chaque nouvel objet. À la place, il fournit une solution qui convient à toutes les situations.
Ensuite, l’autre volet concerne les drones affectés à des tâches de navigation agressive, où ils doivent franchir des obstacles à grande vitesse. « Dans les grandes démonstrations de ce type, les trajectoires sont déjà précalculées et tout est parfaitement calibré, parfois plusieurs jours à l’avance, explique Paolo Robuffo Giordano. Nous voulons au contraire y arriver directement, grâce à la prise en compte des effets de l’incertitude. »
L’autonomie des robots progresse dès qu’il n’est plus nécessaire de recalculer les trajectoires pour chaque obstacle et situation. Cela réduit les besoins en intervention humaine, ou permet à l’inverse à une même personne de contrôler davantage de robots en même temps. Tout cela malgré les inévitables incertitudes de la modélisation.
-------------------------------------------------------------------------------------------------------------------------------------------
Ces recherches ont été financées en tout ou partie, par l’Agence Nationale de la Recherche (ANR) au titre du projet "Planification de mouvements intrinsèquement robuste et tenant compte de la commande pour des robots en conditions réelles" – CAMP – AAP 2020. Cette communication est réalisée et financée dans le cadre de l’appel à projet Sciences Avec et Pour la Société - Culture Scientifique Technique et Industrielle pour les projets JCJC et PRC des appels à projets génériques 2020 (SAPS-CSTI-JCJC et PRC AAPG 20).